Системы улучшенного видения
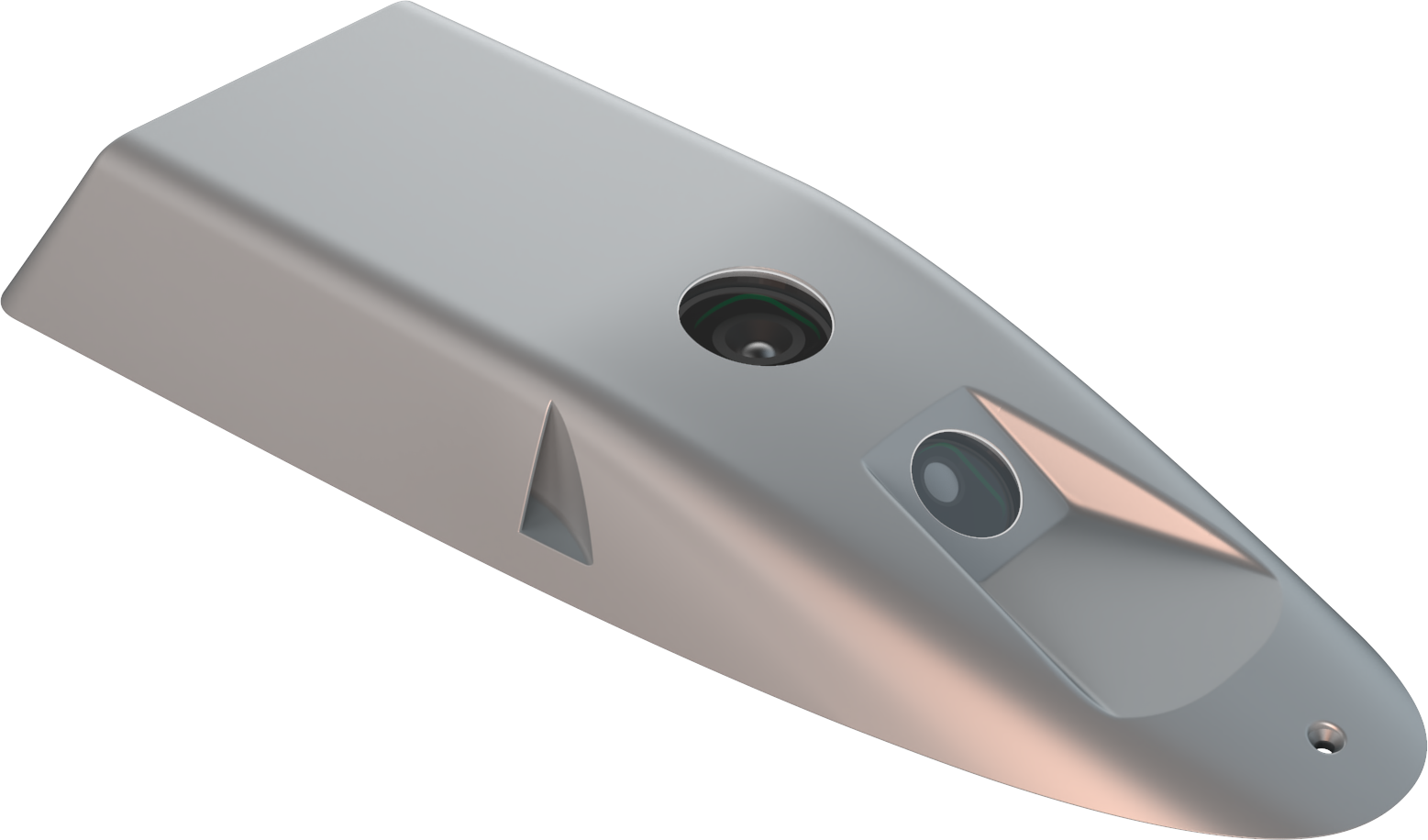
Обзорно-навигационная система ОЭС-ОН
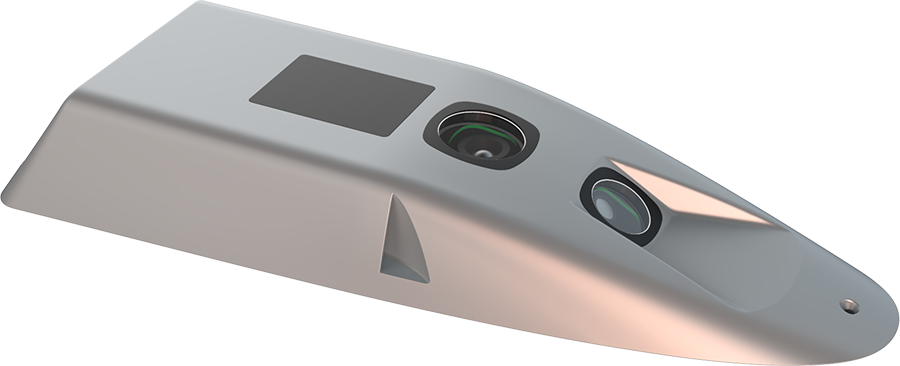
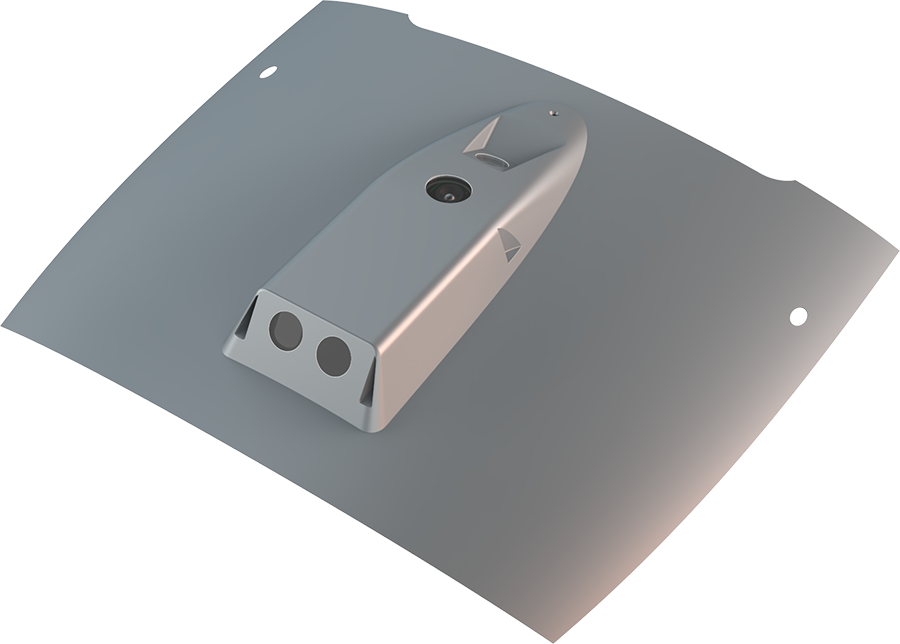
Обзорно-навигационная система ОЭС-ОН обеспечивает обзор пространства телевизионным и инфракрасным каналами в пространстве передней полусферы летательного аппарата, обзор подстилающей поверхности телевизионным каналом в нижней и задней полусфере летательного аппарата, идентификацию положения ВПП на видеоизображении, формируемом системой, относительно положения летательного аппарата, определение местоположения летательного аппарата, используя информацию с вертикально смотрящей камеры и предварительно загруженной картографической базы.
Описание
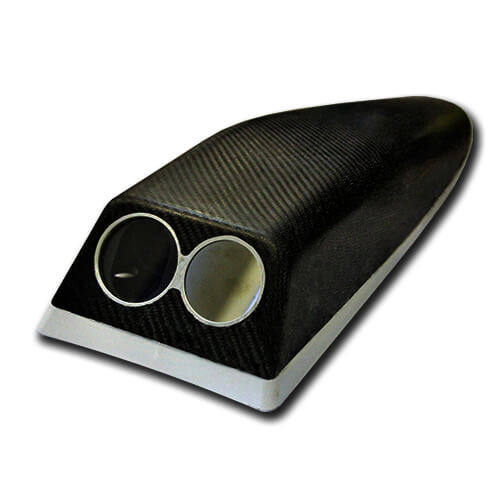
ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРНО-НАВИГАЦИОННАЯ
Система предназначена для визуального контроля окружающего пространства в видимой дальней инфракрасной области спектра.

ОБЩИЕ ОПТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
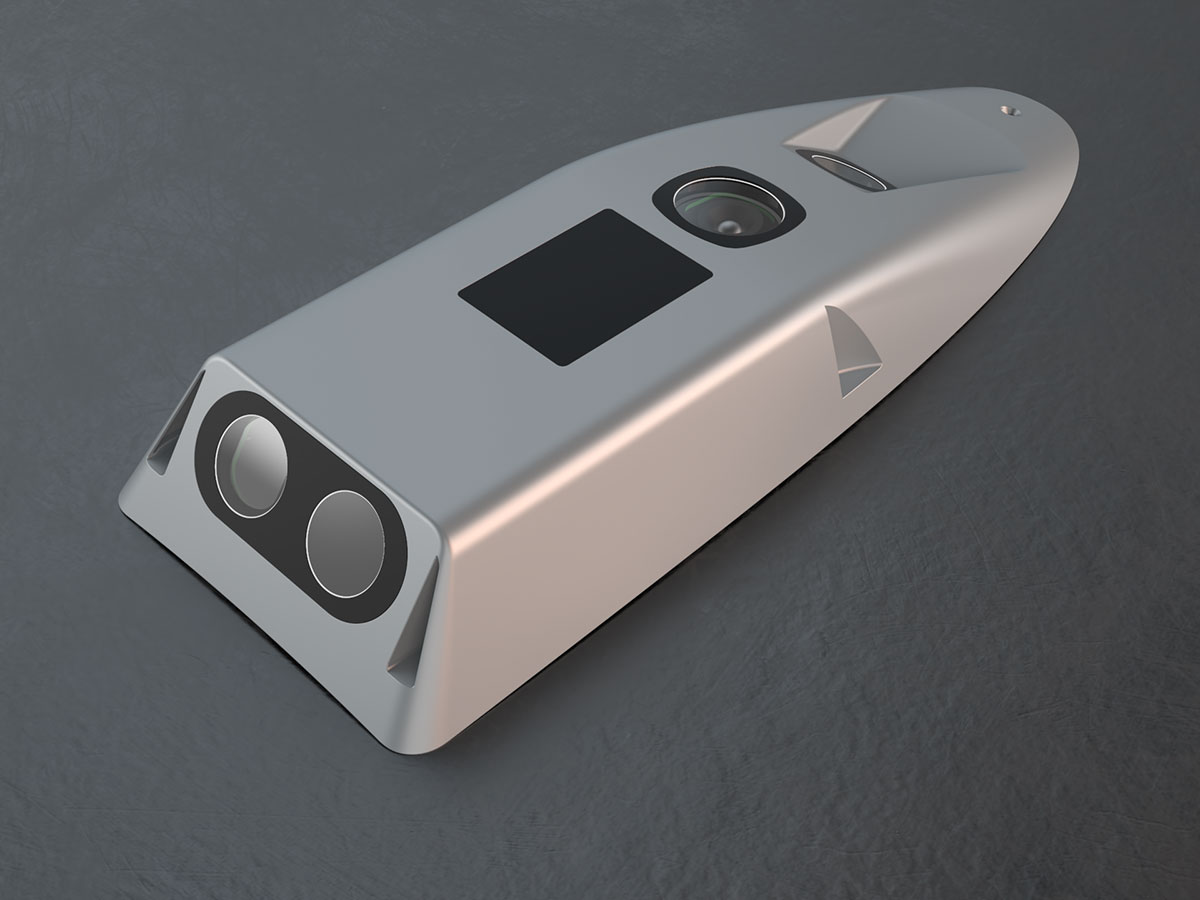
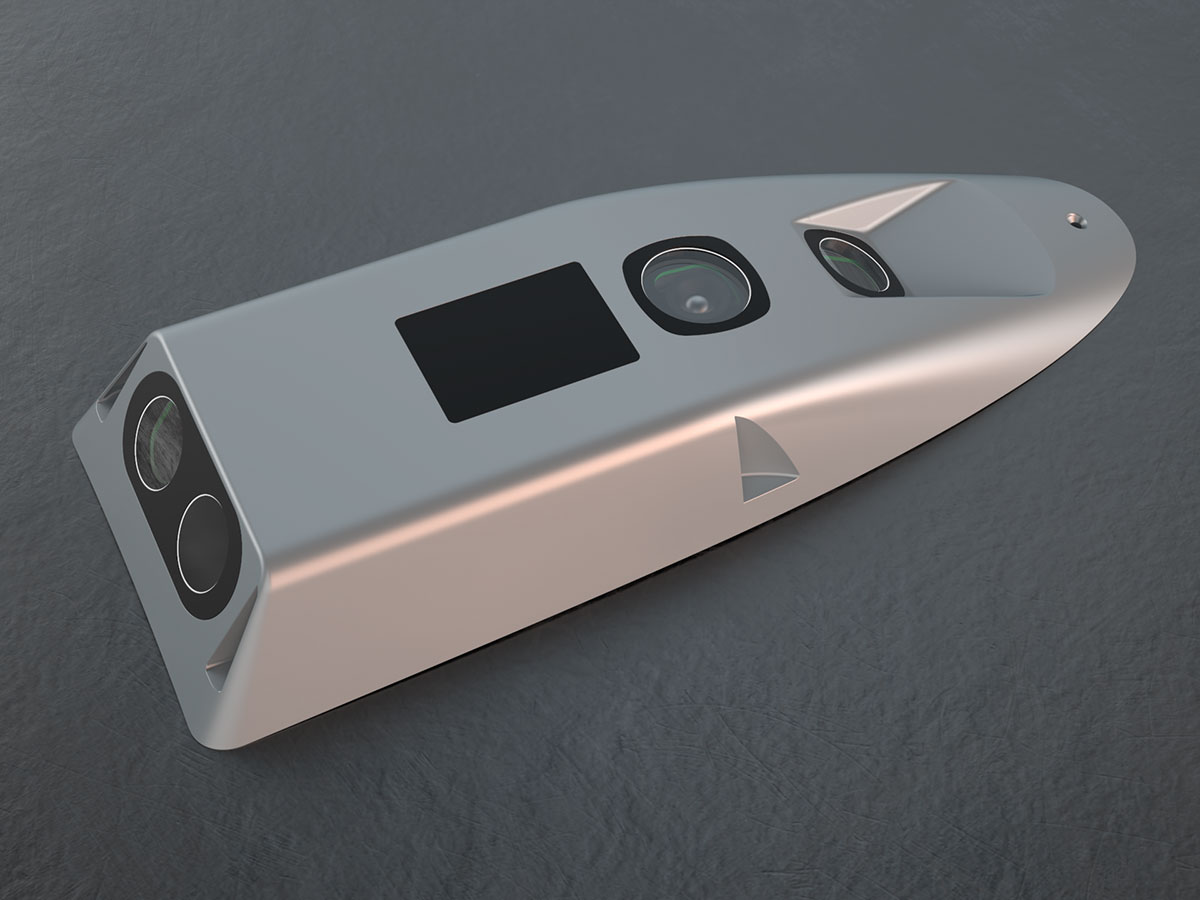
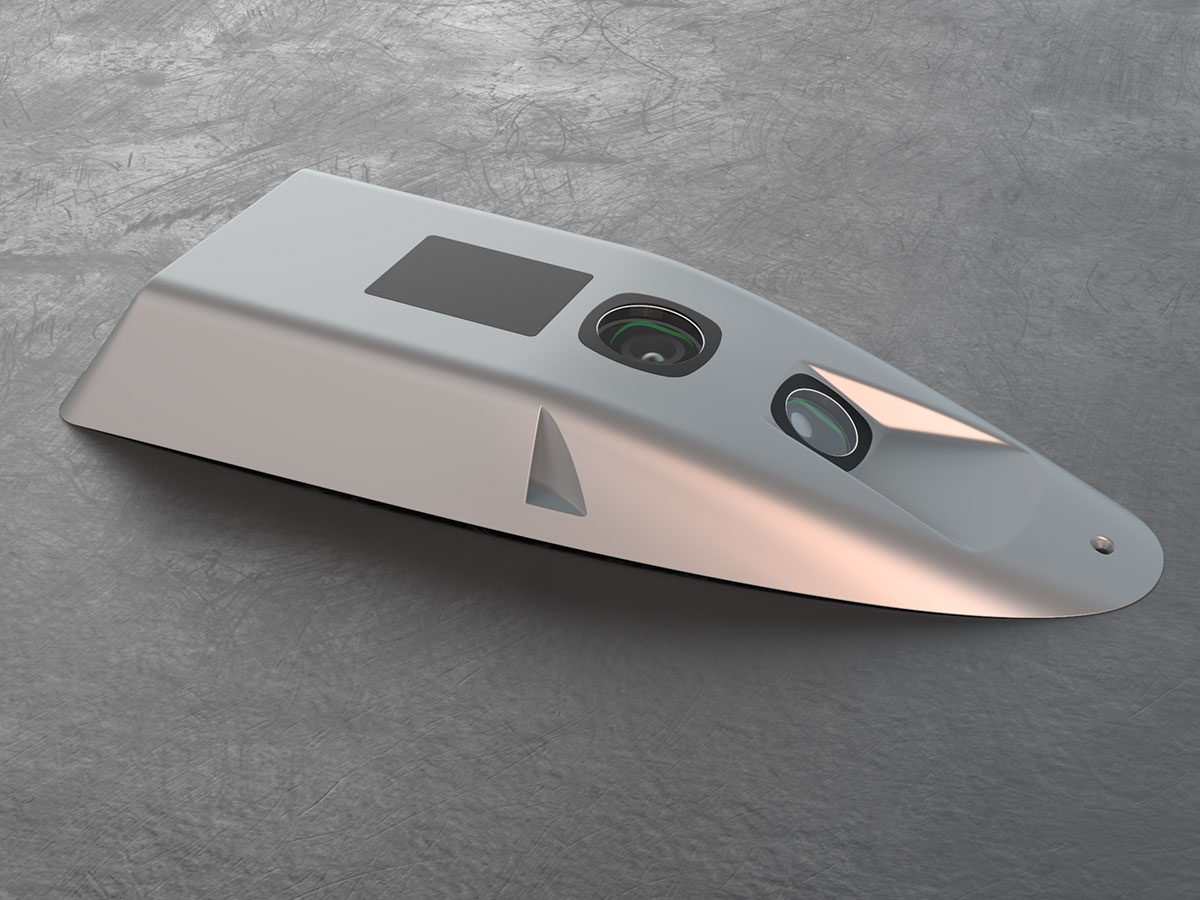
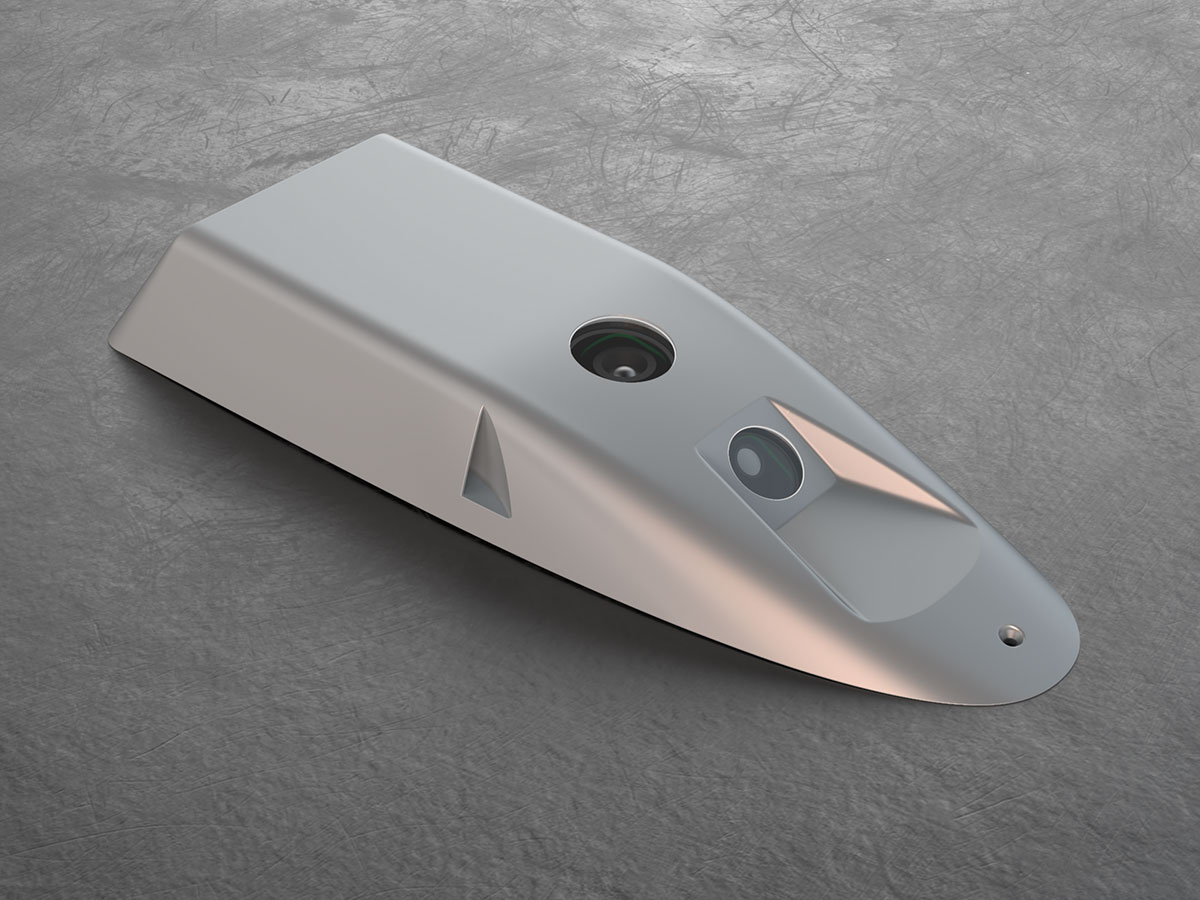
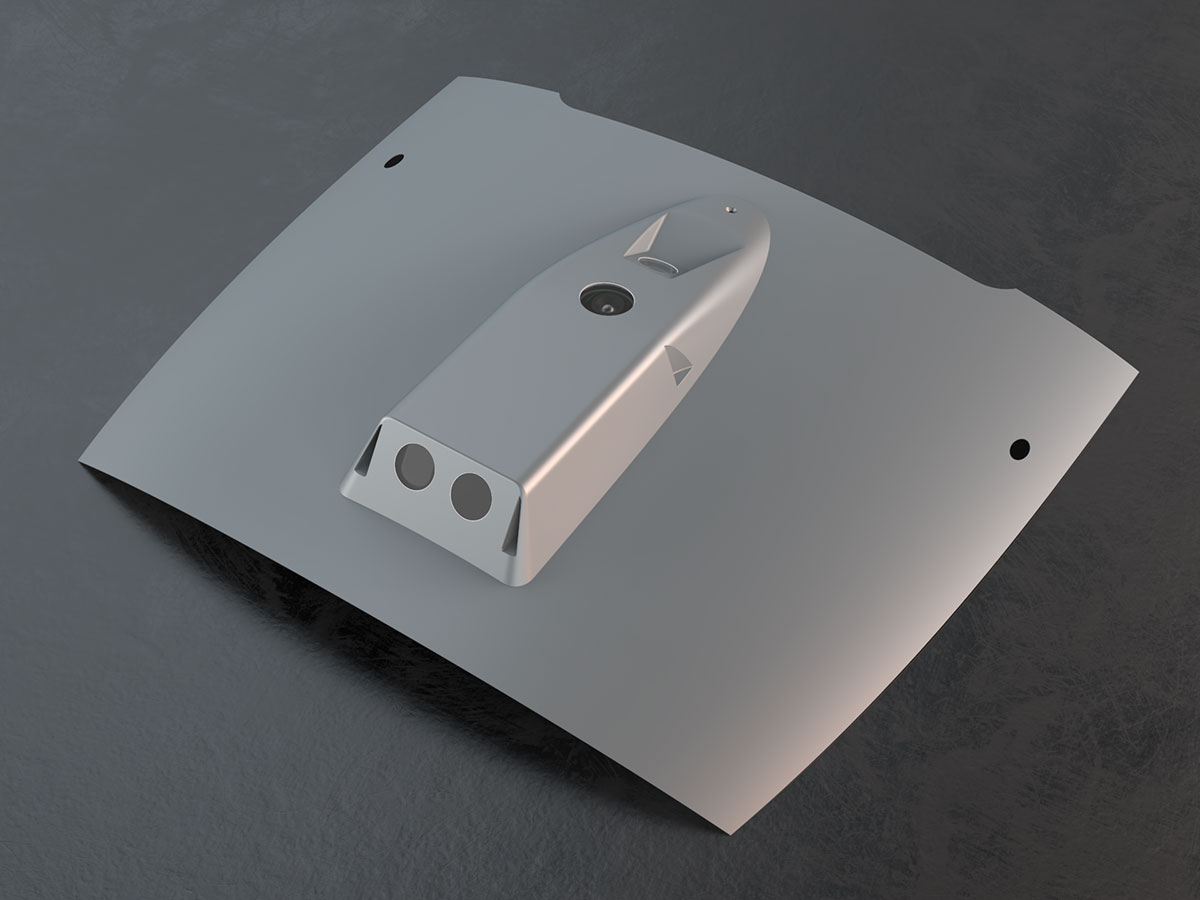
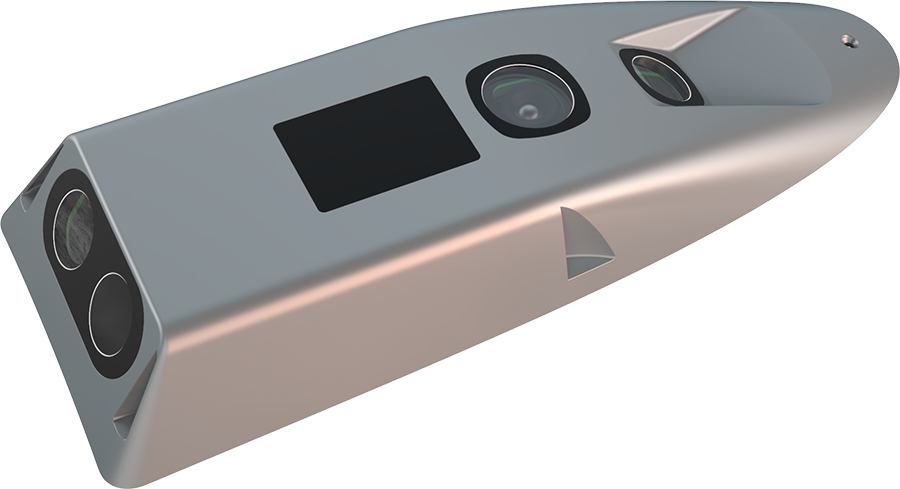
Суммарно система содержит 4 канала. Каналы располагаются по направлениям:
- Передняя полусфера (ТВ+ИК каналы)
- Задняя полусфера (ТВ канал)
- Подстилающая поверхность (ТВ канал)
Характеристики и режимы работы каналов
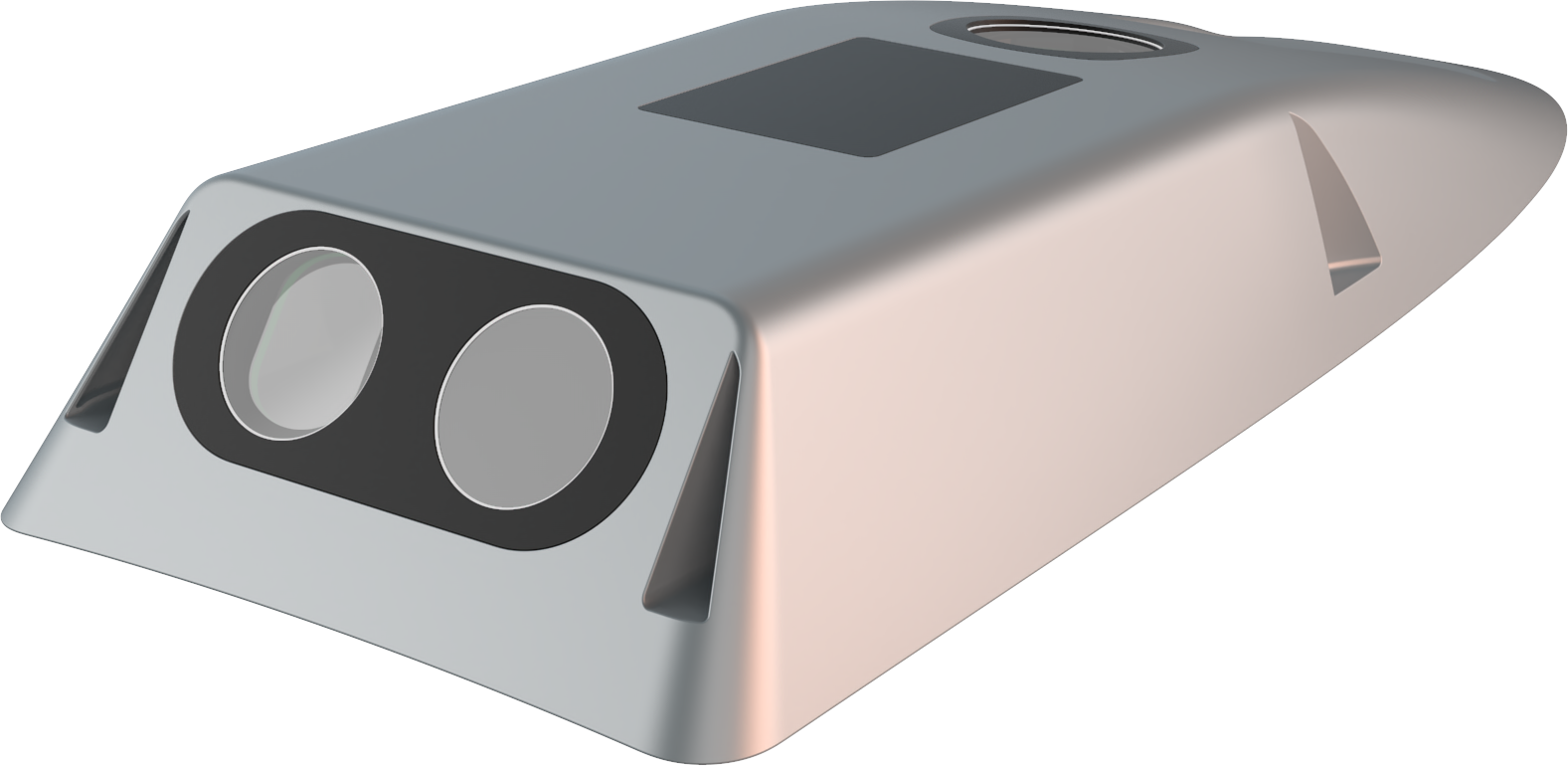
Фронтальный канал образован двумя оптическими каналами разных спектральных диапазонов:
■ Видимый диапазон
Матрица: 5Мп, с глобальным затвором, 400-650 нм
■ Инфракрасный диапазон
Неохлаждаемый болометр:
aSi Gen2, 640х480, 30 Гц,
дальний ИК диапазон 8-14 мкм
Камера обзора задней полусферы:
■ Видимый диапазон
Матрица: 5Мп, 25 Гц, 400-650 нм
Нижняя камера обзора:
■ Видимый диапазон
Матрица: 12Мп, 25 Гц, 400-650 нм
Входные и выходные интерфейсы:
■ Ethernet
■ DVI
■ RS-422
Флэш-память: 32ГБ
Питание: 27В
Масса: 2,5 кг
Габаритные размеры (ДхШхВ):
492мм х 189мм х 68мм
Работа в условиях обледенения:
■ обогрев окон в автоматическом и ручном режимах
■ контроль температуры окон
■ контроль влажности внутри корпуса


ОСНОВНЫЕ ОПТИЧЕСКИЕ И НАВИГАЦИОННЫЕ ФУНКЦИИ
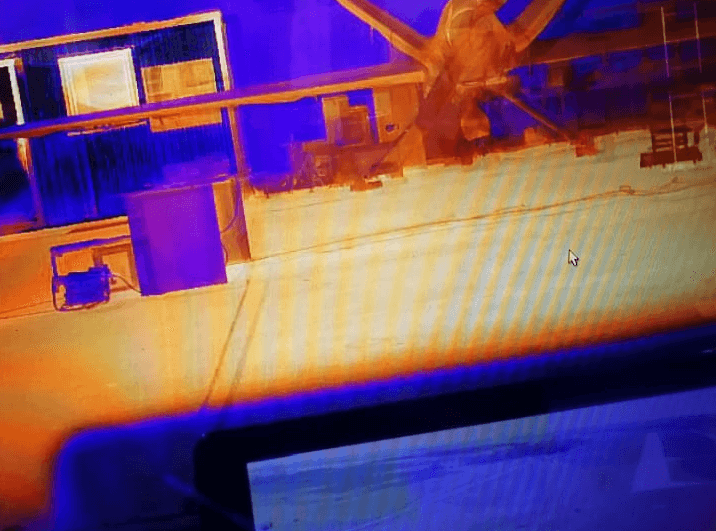
Выдача улучшенного изображения во фронтальном направлении для обнаружения препятствий и целей ночью и в условиях ограниченной видимости (аналогично системе EVS)

Обзор задней полусферы для контроля состояния летательного аппарата

Обзор нижней полусферы для решения задач навигации

Аналитические функции: Обнаружение ВПП и расчет отклонения от глиссады; Расчет географических координат
Навигационные возможности
■ Позиционирование относительно ВПП
Система распознает положение ВПП во фронтальном оптическом канале с использованием алгоритмов ИИ. Далее производится точное распознавание границ ВПП, на основе чего вычисляются координаты носителя курса и глиссады ВПП.
■ Позиционирование по подстилающей поверхности
Система способна определять местоположение носителя, используя информацию с вертикально смотрящей камеры. Источником данных являются предварительно загруженные географически привязанные спутниковые снимки с географической привязкой.
Применение для навигации
■Непрерывный расчет географических координат
■Разовая выдача координат при пролете привязанного навигационного объекта
Рассчитываемые параметры
■ географическая широта и долгота
■ истинный курс
Применение для посадки
■ Обнаружение ВПП и визуальный контроль захода по совмещенному изображению ночью и в условиях недостаточной видимости
■ Обнаружение посторонних объектов и техники ВПП
■ Автоматизированный расчет отклонения от курса и глиссады по визуальным данным
Возможные режимы работы
■ Для каждого канала может быть задействована функция оптической стабилизации
■ Широкоугольный обзор в обратном направлении
■ Обзор пространства вертикально вниз
■ Независимая трансляция каждого канала
■ Совмещенный обзор ИК+ТВ для фронтальных каналов
■ Режим посадки, реализованный с помощью искусственного интеллекта на основе информации, полученной с фронтальной ТВ камеры.
Характеристики и условия работы
| Рабочий диапазон высот, м | 500 – 5000 |
| Рабочий диапазон углов крена, º | ±30 |
| Рабочий диапазон углов тангажа, º | ±15 |
| Рабочий диапазон скоростей, м/с | 0 – 100 |
| Погрешность определения координат по широте, м (σ), не более | ±500 |
| Погрешность определения координат по долготе, м (σ), не более | ±500 |
| Частота выдачи информации, Гц, не менее | 1 |
| Время до начала выдачи координат при наличии начальных координат (горячий старт), минут, не более | 1 |
| Время до начала выдачи координат при отсутствии начальных координат (холодный старт), минут, не более | 10 |
| Рабочий диапазон высот, м | 15 – 300 |
| Рабочий диапазон углов крена, º | ±10 |
| Рабочий диапазон углов тангажа, º | ±10 |
| Рабочий диапазон дальностей, км | 0 – 5 |
| Погрешность определения координат по широте, м (σ), не более | ±10 + 0,02*d |
| Погрешность определения координат по долготе, м (σ), не более | ±10 + 0,02*d |
| Погрешность определения координат по высоте, м (σ), не более | ±5 + 0,01*d |
| Частота выдачи информации, не менее, Гц | 10 |
| Диапазон высот, м | 0 – 9000 |
| Диапазон углов крена, и тангажа º | неограниченно |
| Диапазон скоростей, м/с | 0 – 150 |
| Диапазон температур, ºС | -60 – +70 |